I²C (Inter-Integrated Circuit)
What is I2C
I2C is pronounced "eye-squared see". It is also known as "TWI" because of the initial patent issues of this BUS. This is a popular, low throughput (100-1000Khz), half-duplex BUS that only uses two wires regardless of how many devices are on this BUS. Many sensors use this BUS because of its ease of adding to a system.
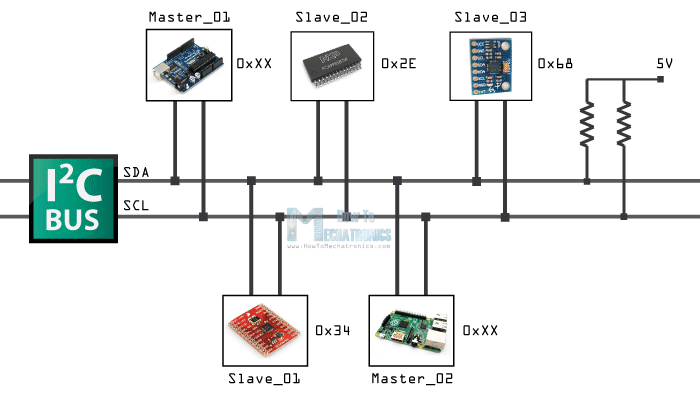
Figure x. of some devices connected up to an I2C bus
Pins of I2C
There are two pins for I2C:
- SCL: Serial clock pin
- SDA: Serial data pin
The clock line is usually controlled by the Master with the exception that the slave may pull it low to indicate to the master that it is not ready to send data.
The data line is bi-directional and is controlled by the Master while sending data, and by the slave when it sends data back after a repeat-start condition described below.
Open-Collector/Open-Drain BUS
I2C is an open-collector BUS, which means that no device shall have the capability of internally connecting either SDA or SCL wires to power source. The communication wires are instead connected to the power source through a "pull-up" resistor. When a device wants to communicate, it simply lets go of the wire for it to go back to logical "high" or "1" or it can connect it to ground to indicate logical "0". This achieves safe operation of the bus (no case of short circuit), even if a device incorrectly assumes control of the bus.
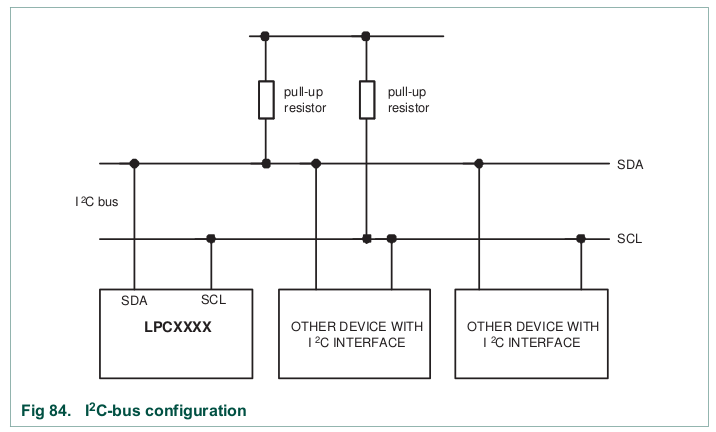
Figure x. Devices connected to I2C bus.
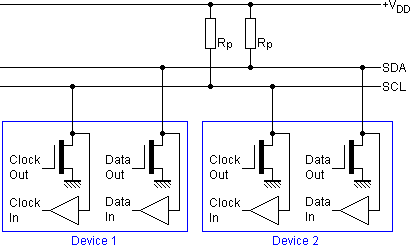
Figure x. I2C device pin output stage.
Pull-up resistor
Using a smaller pull-up can acheive higher speeds, but then each device must have the capability of sinking that much more current. For example, with a 5v BUS, and 1K pull-up, each device must be able to sink 5mA.
Why Use I2C
Pros
-
IO/Pin Count:
- 2 pins bus regardless of the number of devices.
-
Synchronous:
- No need for agreed timing before hand
-
Multi-Master
- Possible to have multiple masters on a I2C bus
-
Multi-slave:
- 7-bit address allows up to an absolute maximum of 119 devices (because 8 addresses are reserved)
- You can increase this number using I2C bus multiplexers
Cons
-
Slow Speed:
- Typical I2C devices have a maximum speed of 400kHz
- Some devices can sense speeds up to 1000kHz or more
-
Half-Duplex:
- Only one device can talk at a time
-
Complex State Machine:
- Requires a rather large and complex state machine in order to handle communication
-
Master Only Control:
- Only a master can drive the bus
- Exception to that rule is that a slave can stop stop the clock if it needs to hold the master in a wait state
-
Hardware Signal Protocol Overhead
- This protocol includes quite a few bits, not associated with data to handle routing and handshaking. This slows the bus throughput even further
Protocol Information
I2C was designed to be able to read and write memory on a slave device. The protocol may be complicated, but a typical "transaction" involving read or write of a register on a slave device is simple granted a "sunny-day scenario" in which no errors occur.
I2C at its foundation is about sending and receiving bytes, but there is a layer of unofficial protocol about how the bytes are interpreted. For instance, for an I2C write transaction, the master sends three bytes and 99% of the cases, they are interpreted like the following:
- Device Address
- Device Register
- Data
The code samples below illustrates I2C transaction split into functions, but this is the wrong way of writing an I2C driver. An I2C driver should be "transaction-based" and the entire transfer should be carried out using a state machine. The idea is to design your software to walk the I2C hardware through its state to complete an I2C transfer.
Signal Timing Diagram
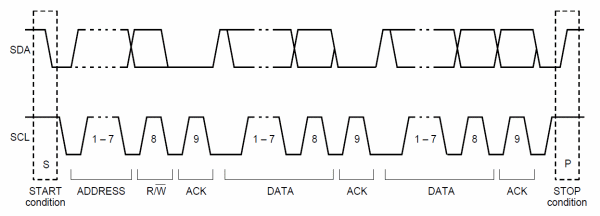
Figure x. I2C communication timing diagram.
Write Transaction
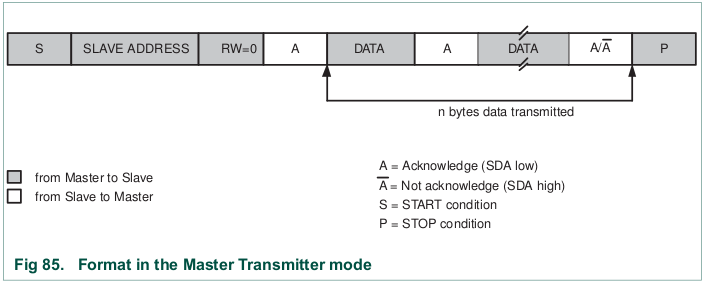
Figure x. Master Transmit format
The master always initiates the transfer, and the device reading the data should always "ACK" the byte. For example, when the master sends the 8-bit address after the START condition, then the addressed slave should ACK the 9th bit (pull the line LOW). Likewise, when the master sends the first byte after the address, the slave should ACK that byte if it wishes to continue the transfer.
A typical I2C write is to be able to write a register or memory address on a slave device. Here are the steps:
- Master sends START condition followed by device address.
- Device that is addressed should then "ACK" using the 9th bit.
- Master sends device's "memory address" (1 or more bytes).
- Each byte should be ACK'd by the addressed slave.
- Master sends the data to write (1 or more bytes).
- Each byte should be ACK'd by the addressed slave.
- Master sends the STOP condition.
To maximize throughput and avoid having to send three I2C bytes for each slave memory write, the memory address is considered "starting address". If we continue to write data, we will end up writing data to M, M+1, M+2 etc.
The ideal way of writing an I2C driver is one that is able to carry out an entire transaction given by the function below.
NOTE: that the function only shows the different actions hardware should take to carry out the transaction, but your software will be a state machine.
void i2c_write_slave_reg(void)
{
// This will accomplish this:
// slave_addr[slave_reg] = data;
i2c_start();
i2c_write(slave_addr);
i2c_write(slave_reg); // This is "M" for "memory address of the slave"
i2c_write(data);
/* Optionaly write more data to slave_reg+1, slave_reg+2 etc. */
// i2c_write(data); /* M + 1 */
// i2c_write(data); /* M + 2 */
i2c_stop();
}Read Transaction
An I2C read is slightly more complex and involves more protocol to follow. What we have to do is switch from "write-mode" to "read-mode" by sending a repeat start, but this time with an ODD address. This transition provides the protocol to allow the slave device to start to control the data line. You can consider an I2C even address being "write-mode" and I2C odd address being "read-mode".
When the master enters the "read mode" after transmitting the read address after a repeat-start, the master begins to "ACK" each byte that the slave sends. When the master "NACKs", it is an indication to the slave that it doesn't want to read anymore bytes from the slave.
Again, the function shows what we want to accomplish. The actual driver should use state machine logic to carry-out the entire transaction.
void i2c_read_slave_reg(void)
{
i2c_start();
i2c_write(slave_addr);
i2c_write(slave_reg);
i2c_start(); // Repeat start
i2c_write(slave_addr | 0x01); // Odd address (last byte Master writes, then Slave begins to control the data line)
char data = i2c_read(0); // NACK last byte
i2c_stop();
}
void i2c_read_multiple_slave_reg(void)
{
i2c_start();
i2c_write(slave_addr);
i2c_write(slave_reg);
// This will accomplish this:
// d1 = slave_addr[slave_reg];
// d2 = slave_addr[slave_reg + 1];
// d3 = slave_addr[slave_reg + 2];
i2c_start();
i2c_write(slave_addr | 0x01);
char d1 = i2c_read(1); // ACK
char d2 = i2c_read(1); // ACK
char d3 = i2c_read(0); // NACK last byte
i2c_stop();
}I2C Slave State Machine Planning
Before you jump right into the assignment, do the following:
- Read and understand how an I2C master performs slave register read and write operation
- Look at existing code to see how the master operation handles the I2C state machine function.
- Next to each of the master state, determine which slave state is entered when the master enters its state
- Determine how your slave memory or registers will be read or written
In each of the states given in the diagrams below, your software should take the step, and the hardware will go to the next state granted that no errors occur. To implement this in your software, you should:
- Perform the planned action after observing the current state
- Clear the "SI" (state change) bit for HW to take the next step
- The HW will then take the next step, and trigger the interrupt when the step is complete
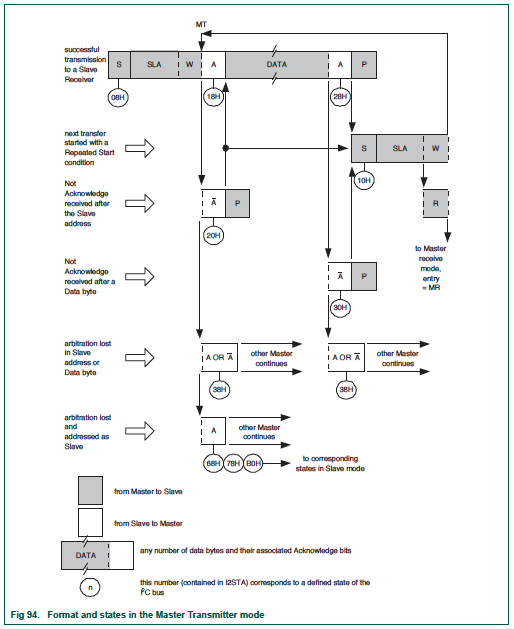
Master Write
In the diagram below, note that when the master sends the "R#", which is the register to write, then the slave state machine should save this data byte as it's INDEX location. Upon the next data byte, the indexed data byte should be written.
Stop here and do the following:
1. Check I2c::I2cHandler()
2. Compare the code to the state diagram below

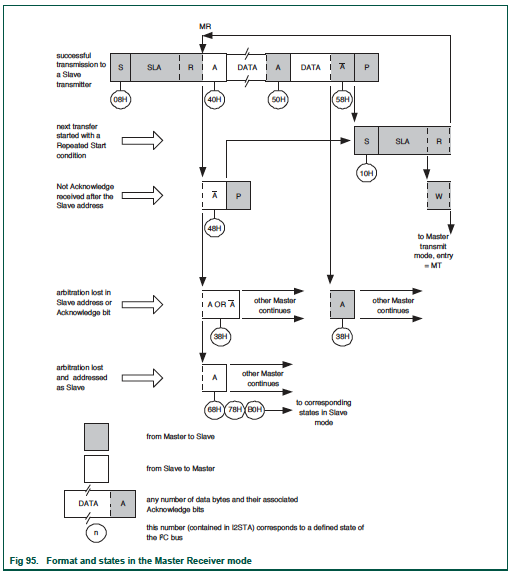
Master Read
In the diagram below, the master will write the index location (the first data byte), and then perform a repeat start. After that, you should start returning your indexed data bytes.