Lesson Interrupts
- Lookup Tables
- Binary Semaphores
- Nested Vector Interrupt Controller (NVIC)
- Lab: Interrupts and Binary Semaphores
Lookup Tables
Objective
To discuss lookup tables and how to use them to sacrifice storage space to increase computation time.
What Are Lookup Tables
Lookup tables are static arrays that sacrifices memory storage in place of a simple array index lookup of precalculated values. In some examples, a lookup table is not meant to speed a process, but simply an elegant solution to a problem.
Lets look at some examples to see why these are useful.
Why Use Lookup Tables
Simple Example: Convert Potentiometer Voltage to Angle
Lets make some assumptions about the system first:
- Using an 8-bit ADC
- Potentiometer is linear
- Potentiometer sweep angle is 180 or 270 degrees
- Potentiometer all the way left is 0 deg and 0V
- Potentiometer all the way right (180/270 deg) is ADC Reference Voltage
- Using a processor that does NOT have a FPU (Floating Point arithmetic Unit) like the Arm Cortex M3 we use in the LPC1756.
double potADCToDegrees(uint8_t adc)
{
return ((double)(adc))*(270/256);
}Code Block 1. Without Lookup
const double potentiometer_angles[256] =
{
// [ADC] = Angle
[0] = 0.0,
[1] = 1.0546875,
[2] = 2.109375,
[3] = 3.1640625,
[4] = 4.21875,
[5] = 5.2734375,
[6] = 6.328125,
[7] = 7.3828125,
[8] = 8.4375,
[9] = 9.4921875,
[10] = 10.546875,
[11] = 11.6015625,
[12] = 12.65625,
[13] = 13.7109375,
[14] = 14.765625,
[15] = 15.8203125,
[16] = 16.875,
[17] = 17.9296875,
[18] = 18.984375,
[19] = 20.0390625,
[20] = 21.09375,
[21] = 22.1484375,
[22] = 23.203125,
[23] = 24.2578125,
[24] = 25.3125,
[25] = 26.3671875,
[26] = 27.421875,
[27] = 28.4765625,
[28] = 29.53125,
[29] = 30.5859375,
[30] = 31.640625,
[31] = 32.6953125,
[32] = 33.75,
[33] = 34.8046875,
[34] = 35.859375,
[35] = 36.9140625,
[36] = 37.96875,
[37] = 39.0234375,
[38] = 40.078125,
[39] = 41.1328125,
[40] = 42.1875,
[41] = 43.2421875,
[42] = 44.296875,
[43] = 45.3515625,
[44] = 46.40625,
[45] = 47.4609375,
[46] = 48.515625,
[47] = 49.5703125,
[48] = 50.625,
[49] = 51.6796875,
[50] = 52.734375,
[51] = 53.7890625,
[52] = 54.84375,
[53] = 55.8984375,
[54] = 56.953125,
[55] = 58.0078125,
[56] = 59.0625,
[57] = 60.1171875,
[58] = 61.171875,
[59] = 62.2265625,
[60] = 63.28125,
[61] = 64.3359375,
[62] = 65.390625,
[63] = 66.4453125,
[64] = 67.5,
[65] = 68.5546875,
[66] = 69.609375,
[67] = 70.6640625,
[68] = 71.71875,
[69] = 72.7734375,
[70] = 73.828125,
[71] = 74.8828125,
[72] = 75.9375,
[73] = 76.9921875,
[74] = 78.046875,
[75] = 79.1015625,
[76] = 80.15625,
[77] = 81.2109375,
[78] = 82.265625,
[79] = 83.3203125,
[80] = 84.375,
[81] = 85.4296875,
[82] = 86.484375,
[83] = 87.5390625,
[84] = 88.59375,
[85] = 89.6484375,
[86] = 90.703125,
[87] = 91.7578125,
[88] = 92.8125,
[89] = 93.8671875,
[90] = 94.921875,
[91] = 95.9765625,
[92] = 97.03125,
[93] = 98.0859375,
[94] = 99.140625,
[95] = 100.1953125,
[96] = 101.25,
[97] = 102.3046875,
[98] = 103.359375,
[99] = 104.4140625,
[100] = 105.46875,
// ...
[240] = 253.125,
[241] = 254.1796875,
[242] = 255.234375,
[243] = 256.2890625,
[244] = 257.34375,
[245] = 258.3984375,
[246] = 259.453125,
[247] = 260.5078125,
[248] = 261.5625,
[249] = 262.6171875,
[250] = 263.671875,
[251] = 264.7265625,
[252] = 265.78125,
[253] = 266.8359375,
[254] = 267.890625,
[255] = 268.9453125,
[256] = 270
};
inline double potADCToDegrees(uint8_t adc)
{
return potentiometer_angles[adc];
}Code Block 2. With Lookup
With the two examples, it may seem trivial since the WITHOUT case is only "really" doing one calculation, mulitplying the uint8_t with (270/256) since the compiler will most likely optimize this value to its result. But if you take a look at the assembly, the results may shock you.
Look up Table Disassembly
00016e08 <main>:
main():
/var/www/html/SJSU-Dev/firmware/Experiements/L5_Application/main.cpp:322
[254] = 268.9411765,
[255] = 270
};
int main(void)
{
16e08: b082 sub sp, #8
/var/www/html/SJSU-Dev/firmware/Experiements/L5_Application/main.cpp:323
volatile double a = potentiometer_angles[15];
16e0a: a303 add r3, pc, #12 ; (adr r3, 16e18 <main+0x10>)
16e0c: e9d3 2300 ldrd r2, r3, [r3]
16e10: e9cd 2300 strd r2, r3, [sp]
16e14: e7fe b.n 16e14 <main+0xc>
16e16: bf00 nop
16e18: c3b9a8ae .word 0xc3b9a8ae
16e1c: 402fc3c3 .word 0x402fc3c3Code Block 3. Dissassembly of Look up Table
Looks about right. You can see at 16e0a the software is retrieving data from the lookup table, and then it is loading it into the double which is on the stack.
Double Floating Point Disassembly
00017c64 <__adddf3>:
__aeabi_dadd():
17c64: b530 push {r4, r5, lr}
17c66: ea4f 0441 mov.w r4, r1, lsl #1
17c6a: ea4f 0543 mov.w r5, r3, lsl #1
17c6e: ea94 0f05 teq r4, r5
17c72: bf08 it eq
17c74: ea90 0f02 teqeq r0, r2
17c78: bf1f itttt ne
17c7a: ea54 0c00 orrsne.w ip, r4, r0
17c7e: ea55 0c02 orrsne.w ip, r5, r2
17c82: ea7f 5c64 mvnsne.w ip, r4, asr #21
17c86: ea7f 5c65 mvnsne.w ip, r5, asr #21
17c8a: f000 80e2 beq.w 17e52 <__adddf3+0x1ee>
17c8e: ea4f 5454 mov.w r4, r4, lsr #21
17c92: ebd4 5555 rsbs r5, r4, r5, lsr #21
17c96: bfb8 it lt
17c98: 426d neglt r5, r5
17c9a: dd0c ble.n 17cb6 <__adddf3+0x52>
17c9c: 442c add r4, r5
17c9e: ea80 0202 eor.w r2, r0, r2
17ca2: ea81 0303 eor.w r3, r1, r3
17ca6: ea82 0000 eor.w r0, r2, r0
17caa: ea83 0101 eor.w r1, r3, r1
17cae: ea80 0202 eor.w r2, r0, r2
17cb2: ea81 0303 eor.w r3, r1, r3
17cb6: 2d36 cmp r5, #54 ; 0x36
17cb8: bf88 it hi
17cba: bd30 pophi {r4, r5, pc}
17cbc: f011 4f00 tst.w r1, #2147483648 ; 0x80000000
17cc0: ea4f 3101 mov.w r1, r1, lsl #12
17cc4: f44f 1c80 mov.w ip, #1048576 ; 0x100000
17cc8: ea4c 3111 orr.w r1, ip, r1, lsr #12
17ccc: d002 beq.n 17cd4 <__adddf3+0x70>
17cce: 4240 negs r0, r0
17cd0: eb61 0141 sbc.w r1, r1, r1, lsl #1
17cd4: f013 4f00 tst.w r3, #2147483648 ; 0x80000000
17cd8: ea4f 3303 mov.w r3, r3, lsl #12
17cdc: ea4c 3313 orr.w r3, ip, r3, lsr #12
17ce0: d002 beq.n 17ce8 <__adddf3+0x84>
17ce2: 4252 negs r2, r2
17ce4: eb63 0343 sbc.w r3, r3, r3, lsl #1
17ce8: ea94 0f05 teq r4, r5
17cec: f000 80a7 beq.w 17e3e <__adddf3+0x1da>
17cf0: f1a4 0401 sub.w r4, r4, #1
17cf4: f1d5 0e20 rsbs lr, r5, #32
17cf8: db0d blt.n 17d16 <__adddf3+0xb2>
17cfa: fa02 fc0e lsl.w ip, r2, lr
17cfe: fa22 f205 lsr.w r2, r2, r5
17d02: 1880 adds r0, r0, r2
17d04: f141 0100 adc.w r1, r1, #0
17d08: fa03 f20e lsl.w r2, r3, lr
17d0c: 1880 adds r0, r0, r2
17d0e: fa43 f305 asr.w r3, r3, r5
17d12: 4159 adcs r1, r3
17d14: e00e b.n 17d34 <__adddf3+0xd0>
17d16: f1a5 0520 sub.w r5, r5, #32
17d1a: f10e 0e20 add.w lr, lr, #32
17d1e: 2a01 cmp r2, #1
17d20: fa03 fc0e lsl.w ip, r3, lr
17d24: bf28 it cs
17d26: f04c 0c02 orrcs.w ip, ip, #2
17d2a: fa43 f305 asr.w r3, r3, r5
17d2e: 18c0 adds r0, r0, r3
17d30: eb51 71e3 adcs.w r1, r1, r3, asr #31
17d34: f001 4500 and.w r5, r1, #2147483648 ; 0x80000000
17d38: d507 bpl.n 17d4a <__adddf3+0xe6>
17d3a: f04f 0e00 mov.w lr, #0
17d3e: f1dc 0c00 rsbs ip, ip, #0
17d42: eb7e 0000 sbcs.w r0, lr, r0
17d46: eb6e 0101 sbc.w r1, lr, r1
17d4a: f5b1 1f80 cmp.w r1, #1048576 ; 0x100000
17d4e: d31b bcc.n 17d88 <__adddf3+0x124>
17d50: f5b1 1f00 cmp.w r1, #2097152 ; 0x200000
17d54: d30c bcc.n 17d70 <__adddf3+0x10c>
17d56: 0849 lsrs r1, r1, #1
17d58: ea5f 0030 movs.w r0, r0, rrx
17d5c: ea4f 0c3c mov.w ip, ip, rrx
17d60: f104 0401 add.w r4, r4, #1
17d64: ea4f 5244 mov.w r2, r4, lsl #21
17d68: f512 0f80 cmn.w r2, #4194304 ; 0x400000
17d6c: f080 809a bcs.w 17ea4 <__adddf3+0x240>
17d70: f1bc 4f00 cmp.w ip, #2147483648 ; 0x80000000
17d74: bf08 it eq
17d76: ea5f 0c50 movseq.w ip, r0, lsr #1
17d7a: f150 0000 adcs.w r0, r0, #0
17d7e: eb41 5104 adc.w r1, r1, r4, lsl #20
17d82: ea41 0105 orr.w r1, r1, r5
17d86: bd30 pop {r4, r5, pc}
17d88: ea5f 0c4c movs.w ip, ip, lsl #1
17d8c: 4140 adcs r0, r0
17d8e: eb41 0101 adc.w r1, r1, r1
17d92: f411 1f80 tst.w r1, #1048576 ; 0x100000
17d96: f1a4 0401 sub.w r4, r4, #1
17d9a: d1e9 bne.n 17d70 <__adddf3+0x10c>
17d9c: f091 0f00 teq r1, #0
17da0: bf04 itt eq
17da2: 4601 moveq r1, r0
17da4: 2000 moveq r0, #0
17da6: fab1 f381 clz r3, r1
17daa: bf08 it eq
17dac: 3320 addeq r3, #32
17dae: f1a3 030b sub.w r3, r3, #11
17db2: f1b3 0220 subs.w r2, r3, #32
17db6: da0c bge.n 17dd2 <__adddf3+0x16e>
17db8: 320c adds r2, #12
17dba: dd08 ble.n 17dce <__adddf3+0x16a>
17dbc: f102 0c14 add.w ip, r2, #20
17dc0: f1c2 020c rsb r2, r2, #12
17dc4: fa01 f00c lsl.w r0, r1, ip
17dc8: fa21 f102 lsr.w r1, r1, r2
17dcc: e00c b.n 17de8 <__adddf3+0x184>
17dce: f102 0214 add.w r2, r2, #20
17dd2: bfd8 it le
17dd4: f1c2 0c20 rsble ip, r2, #32
17dd8: fa01 f102 lsl.w r1, r1, r2
17ddc: fa20 fc0c lsr.w ip, r0, ip
17de0: bfdc itt le
17de2: ea41 010c orrle.w r1, r1, ip
17de6: 4090 lslle r0, r2
17de8: 1ae4 subs r4, r4, r3
17dea: bfa2 ittt ge
17dec: eb01 5104 addge.w r1, r1, r4, lsl #20
17df0: 4329 orrge r1, r5
17df2: bd30 popge {r4, r5, pc}
17df4: ea6f 0404 mvn.w r4, r4
17df8: 3c1f subs r4, #31
17dfa: da1c bge.n 17e36 <__adddf3+0x1d2>
17dfc: 340c adds r4, #12
17dfe: dc0e bgt.n 17e1e <__adddf3+0x1ba>
17e00: f104 0414 add.w r4, r4, #20
17e04: f1c4 0220 rsb r2, r4, #32
17e08: fa20 f004 lsr.w r0, r0, r4
17e0c: fa01 f302 lsl.w r3, r1, r2
17e10: ea40 0003 orr.w r0, r0, r3
17e14: fa21 f304 lsr.w r3, r1, r4
17e18: ea45 0103 orr.w r1, r5, r3
17e1c: bd30 pop {r4, r5, pc}
17e1e: f1c4 040c rsb r4, r4, #12
17e22: f1c4 0220 rsb r2, r4, #32
17e26: fa20 f002 lsr.w r0, r0, r2
17e2a: fa01 f304 lsl.w r3, r1, r4
17e2e: ea40 0003 orr.w r0, r0, r3
17e32: 4629 mov r1, r5
17e34: bd30 pop {r4, r5, pc}
17e36: fa21 f004 lsr.w r0, r1, r4
17e3a: 4629 mov r1, r5
17e3c: bd30 pop {r4, r5, pc}
17e3e: f094 0f00 teq r4, #0
17e42: f483 1380 eor.w r3, r3, #1048576 ; 0x100000
17e46: bf06 itte eq
17e48: f481 1180 eoreq.w r1, r1, #1048576 ; 0x100000
17e4c: 3401 addeq r4, #1
17e4e: 3d01 subne r5, #1
17e50: e74e b.n 17cf0 <__adddf3+0x8c>
17e52: ea7f 5c64 mvns.w ip, r4, asr #21
17e56: bf18 it ne
17e58: ea7f 5c65 mvnsne.w ip, r5, asr #21
17e5c: d029 beq.n 17eb2 <__adddf3+0x24e>
17e5e: ea94 0f05 teq r4, r5
17e62: bf08 it eq
17e64: ea90 0f02 teqeq r0, r2
17e68: d005 beq.n 17e76 <__adddf3+0x212>
17e6a: ea54 0c00 orrs.w ip, r4, r0
17e6e: bf04 itt eq
17e70: 4619 moveq r1, r3
17e72: 4610 moveq r0, r2
17e74: bd30 pop {r4, r5, pc}
17e76: ea91 0f03 teq r1, r3
17e7a: bf1e ittt ne
17e7c: 2100 movne r1, #0
17e7e: 2000 movne r0, #0
17e80: bd30 popne {r4, r5, pc}
17e82: ea5f 5c54 movs.w ip, r4, lsr #21
17e86: d105 bne.n 17e94 <__adddf3+0x230>
17e88: 0040 lsls r0, r0, #1
17e8a: 4149 adcs r1, r1
17e8c: bf28 it cs
17e8e: f041 4100 orrcs.w r1, r1, #2147483648 ; 0x80000000
17e92: bd30 pop {r4, r5, pc}
17e94: f514 0480 adds.w r4, r4, #4194304 ; 0x400000
17e98: bf3c itt cc
17e9a: f501 1180 addcc.w r1, r1, #1048576 ; 0x100000
17e9e: bd30 popcc {r4, r5, pc}
17ea0: f001 4500 and.w r5, r1, #2147483648 ; 0x80000000
17ea4: f045 41fe orr.w r1, r5, #2130706432 ; 0x7f000000
17ea8: f441 0170 orr.w r1, r1, #15728640 ; 0xf00000
17eac: f04f 0000 mov.w r0, #0
17eb0: bd30 pop {r4, r5, pc}
17eb2: ea7f 5c64 mvns.w ip, r4, asr #21
17eb6: bf1a itte ne
17eb8: 4619 movne r1, r3
17eba: 4610 movne r0, r2
17ebc: ea7f 5c65 mvnseq.w ip, r5, asr #21
17ec0: bf1c itt ne
17ec2: 460b movne r3, r1
17ec4: 4602 movne r2, r0
17ec6: ea50 3401 orrs.w r4, r0, r1, lsl #12
17eca: bf06 itte eq
17ecc: ea52 3503 orrseq.w r5, r2, r3, lsl #12
17ed0: ea91 0f03 teqeq r1, r3
17ed4: f441 2100 orrne.w r1, r1, #524288 ; 0x80000
17ed8: bd30 pop {r4, r5, pc}
17eda: bf00 nopCode Block 4. Arm Software Floating Point Addition Implementation
This isn't even the full code. This is a function that our calculation function has to run each time it wants to add two doubles together. Also, note that it is not just a straight shot of 202 instructions, because you can see that there are loops in the code where ever you see an instruction's mnemonic that starts with the letter b (stands for branch).
Other Use Cases
- Correlate degrees to radians (assuming degrees are whole numbers)
- Table of cosine or sine given radians or degrees
- In the radians case, you will need to create your own trivial hashing function to convert radians to an index
- Finding a number of bits SET in a 32-bit number
- Without a lookup table time complexity is O(n) where (n = 32), the number of bits you want to look through
- With a lookup table, the time complexity is O(1), constant time, and only needs the followin operations
- 3 bitwise left shifts operations
- 4 bitwise ANDS operations
- 4 load from memory addresses
- 4 binary ADD operations
- Total of 15 operations total
/* Found this on wikipedia! */
/* Pseudocode of the lookup table 'uint32_t bits_set[256]' */
/* 0b00, 0b01, 0b10, 0b11, 0b100, 0b101, ... */
int bits_set[256] = { 0, 1, 1, 2, 1, 2, // 200+ more entries
/* (this code assumes that 'int' is an unsigned 32-bits wide integer) */
int count_ones(unsigned int x) {
return bits_set[ x & 255] + bits_set[(x >> 8) & 255]
+ bits_set[(x >> 16) & 255] + bits_set[(x >> 24) & 255];
}Code Block 5. Bits set in a 32-bit number (Found this on wikipedia (look up tables))
There are far more use cases then this, but these are a few.
Lookup Table Decision Tree
Lookup tables can be used as elegant ways to structure information. In this case, they may not provide a speed up but they will associate indexes with something greater, making your code more readable and easier to maintain. In this example, we will be looking at a matrix of function pointers.
Example: Replace Decision Tree
See the function below:
void makeADecisionRobot(bool power_system_nominal, bool no_obstacles_ahead)
{
if(power_system_nominal && no_obstacles_ahead) {
moveForward();
}
else if(power_system_nominal && !no_obstacles_ahead) {
moveOutOfTheWay();
}
else if(!power_system_nominal && no_obstacles_ahead) {
slowDown();
}
else {
emergencyStop();
}
}Code Block 6. Typical Decision Tree
void (* decision_matrix[2][2])(void) =
{
[1][1] = moveForward,
[1][0] = moveOutOfTheWay,
[0][1] = slowDown,
[0][0] = emergencyStop,
};
void makeADecisionRobot(bool power_system_nominal, bool no_obstacles_ahead)
{
decision_matrix[power_system_nominal][no_obstacles_ahead]();
}Code Block 7. Lookup Table Decision Tree
The interesting thing about the decision tree is that it is also more optimal in that, it takes a few instructions to do the look up from memory, then the address of the procedure [function] is looked up an executed, where the former required multiple read instructions and comparison instructions.
This pattern of lookup table will be most useful to us for the interrupts lab assignment.
Binary Semaphores
Semaphores are used to signal/synchronize tasks as well as protect resources.
A binary semaphore can (and should) be used as a means of signaling a task. This signal can come from an interrupt service routine or from another task. A semaphore is an RTOS primitive and is guaranteed to be thread-safe.
Design Pattern
Wake Up On Semaphore
The idea here is to have a task that is waiting on a semaphore and when it is given by an ISR or an other task, this task unblocks, and runs its code. This results in a task that usually sleeping/blocked and not utilizing CPU time unless its been called upon. In FreeRTOS, there is a similar facility provided which is called 'deferred interrupt processing'. This could be used to signal an emergency shutdown procedure when a button is triggered, or to trigger a procedure when the state of the system reaches a fault condition. Sample code below:
/* Declare the instance of the semaphore but not that you have to still 'create' it which is done in the main() */
SemaphoreHandle_t xSemaphore;
void wait_on_semaphore_task(void * pvParameters) {
while(1) {
/* Wait forever until a the semaphore is sent/given */
if(xSemaphoreTake(xSemaphore, portMAX_DELAY)) {
printf("Semaphore taken\n");
/* Do more stuff below ... */
}
}
}
void semaphore_supplier_task(void * pvParameters) {
while(1) {
if(checkButtonStatus()) {
xSemaphoreGive(xSemaphore);
}
/* Do more stuff ... */
}
}
int main()
{
/* Semaphore starts 'empty' when you create it */
xSemaphore = xSemaphoreCreateBinary();
/* Create the tasks */
const uint32_t STACK_SIZE_WORDS = 128;
xTaskCreate(wait_on_semaphore_task, "Waiter", 512, NULL, PRIORITY_LOW, NULL);
xTaskCreate(semaphore_supplier_task, "Supplier", 512, NULL, PRIORITY_LOW, NULL);
/* Start Scheduler */
vTaskStartScheduler();
}Code Block 1. How to use Semaphores and use as a wake up pattern
Semaphore as a flag
The idea of this is to have a code loop that checks the semaphore periodically with the 'block time' of your choice. The task will only react when it notices that the semaphore flag has been given. When your task takes it, it will run an if statement block and continue its loop. Keep in mind this will consume your flag, so the consumer will loop back and check for the presence of the new flag in the following loop.
void vWaitOnSemaphore( void * pvParameters )
{
while(1) {
/* Check the semaphore if it was set */
if(xSemaphoreTake(xSemaphore, 0)) {
printf("Got the Semaphore, consumed the flag indicator.");
/* Do stuff upon taking the semaphore successfully ... */
}
/* Do more stuff ... */
}
}Code Block 2. Semaphores as a consumable flag
Interrupt Signal from ISR
This is useful, because ISRs should be as short as possible as they interrupt the software or your RTOS tasks. In this case, the ISR can defer the work to a task, which means that the ISR runtime is short. This is important because when you enter an interrupt function, the interrupts are disabled during the ISRs execution. The priority of the task can be configured based on the importance of the task reacting to the semaphore.
You may not want to defer interrupt processing if the ISR is so critical that the time it takes to allow RTOS to run is too much. For example, a power failure interrupt.
void systemInterrupt() {
xSemaphoreGiveFromISR(xSemaphore);
}
void vSystemInterruptTask(void * pvParameter) {
while(1) {
if(xSemaphoreTake(xSemaphore, portMAX_DELAY)) {
// Process the interrupt
}
}
}Code Block 3. Semaphore used within an ISR
NOTICE: The FromISR after the xSemaphoreGive API call? If you are making an RTOS API call from an ISR, you must use the FromISR variant of the API call. Undefined behavior otherwise like freezing the system.
Nested Vector Interrupt Controller (NVIC)
Objective
This tutorial demonstrates how to use interrupts on a processor. In general, you will understand the concept behind interrupts on any processor, but we will use the SJ2 board as an example.
What is an interrupt?
An interrupt is the hardware capability of a CPU to break the normal flow of software to attend an urgent request.
The science behind interrupts lies in the hardware that allows the CPU to be interrupted. Each peripheral in a micro-controller may be able to assert an interrupt to the CPU core, and then the CPU core would jump to the corresponding interrupt service routine (ISR) to service the interrupt.
void main_loop(void) {
while (forever) {
logic();
another_function();
// ...
}
}
// Interrupt on button-press
void button_press_interrupt(void) {
}ISR Procedure
The following steps demonstrate what happens when an interrupt occurs :
- CPU manipulates the PC (program counter) to jump to the ISR
- IMPORTANT: CPU will disable interrupts (or that priority level's interrupts until the end of ISR)
- Registers are saved before running the ISR (pushed onto the stack)
- ISR is run
- Registers are restored (popped from stack)
- Interrupts are re-enabled (or that priority level's interrupt is re-enabled)
On some processors, the savings and restoring of registers is a manual step and the compiler would help you do it. You can google the "GCC interrupt attribute" to study this topic further. On the SJ2 board, which uses LPC40xx (ARM Cortex M4), this step is automatically taken care of by the CPU hardware.

Figure 1. Nested Interrupt Processing
{kind=link}
Nested Vector Interrupt Controller
Nested Vector Interrupt Controllers or NVIC for short, have two properties:
- Can handle multiple interrupts.
- The number of interrupts implemented is device-dependent.
- A programmable priority level for each interrupt.
- A higher level corresponds to a lower priority, so level 0 is the highest interrupt priority.
- Level and pulse detection of interrupt signals.
- Grouping of priority values into group priority and sub-priority fields.
- This means that interrupts of the same priority are grouped together and do not preempt each other.
- Each interrupt also has a sub-priority field which is used to figure out the run order of pending interrupts of the same priority.
- Interrupt tail-chaining.
- This enables back-to-back interrupt processing without the overhead of state saving and restoration between interrupts.
- This saves us from the step of having to restore and then save the registers again.
- An external Non-maskable interrupt (NMI)
NVIC Interrupt Example

Figure 2. Multiple Interrupt Processing
{kind=link}
The SW to HW Connection
Now that we understand how the CPU hardware services interrupts, we need to define how we inform the CPU WHERE our ISR function is located at.
Interrupt Vector Table
This table is nothing but addresses of functions that correspond to the microcontroller interrupts. Specific interrupts use specific "slots" in this table, and we have to populate these spots with our software functions that service the interrupts.

SJTwo (LPC40xx) Example
Using a linker script and compiler directives (commands for the compiler), the compiler is able to place the software interrupt vector table at a specific location that the CPU expects the interrupt vector table to be located at. This connects the dots about how the CPU is able to determine WHERE your interrupt service routines are located at. From there on, anytime a specific interrupt occurs, the CPU is able to fetch the address and make the JUMP.
static void halt(void);
typedef void (*void_func_ptr_t)(void);
__attribute__((section(".interrupt_vector_table"))) void_func_ptr_t interrupt_vector_table[] = {
/**
* Core interrupt vectors - Mandated by Cortex-M4 core
*/
(void_func_ptr_t)&_estack, // 0 ARM: Initial stack pointer
cpu_startup_entry_point, // 1 ARM: Initial program counter
halt, // 2 ARM: Non-maskable interrupt
halt, // 3 ARM: Hard fault
halt, // 4 ARM: Memory management fault
halt, // 5 ARM: Bus fault
halt, // 6 ARM: Usage fault
halt, // 7 ARM: Reserved
halt, // 8 ARM: Reserved
halt, // 9 ARM: Reserved
halt, // 10 ARM: Reserved
vPortSVCHandler, // 11 ARM: Supervisor call (SVCall)
halt, // 12 ARM: Debug monitor
halt, // 13 ARM: Reserved
xPortPendSVHandler, // 14 ARM: Pendable request for system service (PendableSrvReq)
xPortSysTickHandler, // 15 ARM: System Tick Timer (SysTick)
/**
* Device interrupt vectors - routed to a 'dispatcher' that allows users to register their ISR at this vector
* You can 'hijack' this vector and directly install your interrupt service routine
*/
lpc_peripheral__interrupt_dispatcher, // 16 WDT
lpc_peripheral__interrupt_dispatcher, // 17 Timer 0
lpc_peripheral__interrupt_dispatcher, // 18 Timer 1
lpc_peripheral__interrupt_dispatcher, // 19 Timer 2
lpc_peripheral__interrupt_dispatcher, // 20 Timer 3
lpc_peripheral__interrupt_dispatcher, // 21 UART 0
lpc_peripheral__interrupt_dispatcher, // 22 UART 1
lpc_peripheral__interrupt_dispatcher, // 23 UART 2
lpc_peripheral__interrupt_dispatcher, // 24 UART 3
lpc_peripheral__interrupt_dispatcher, // 25 PWM 1
lpc_peripheral__interrupt_dispatcher, // 26 I2C 0
lpc_peripheral__interrupt_dispatcher, // 27 I2C 1
lpc_peripheral__interrupt_dispatcher, // 28 I2C 2
lpc_peripheral__interrupt_dispatcher, // 29 UNUSED
lpc_peripheral__interrupt_dispatcher, // 30 SSP 0
lpc_peripheral__interrupt_dispatcher, // 31 SSP 1
lpc_peripheral__interrupt_dispatcher, // 32 PLL 0
lpc_peripheral__interrupt_dispatcher, // 33 RTC and Event Monitor/Recorder
lpc_peripheral__interrupt_dispatcher, // 34 External Interrupt 0 (EINT 0)
lpc_peripheral__interrupt_dispatcher, // 35 External Interrupt 1 (EINT 1)
lpc_peripheral__interrupt_dispatcher, // 36 External Interrupt 2 (EINT 2)
lpc_peripheral__interrupt_dispatcher, // 37 External Interrupt 3 (EINT 3)
lpc_peripheral__interrupt_dispatcher, // 38 ADC
lpc_peripheral__interrupt_dispatcher, // 39 BOD
lpc_peripheral__interrupt_dispatcher, // 40 USB
lpc_peripheral__interrupt_dispatcher, // 41 CAN
lpc_peripheral__interrupt_dispatcher, // 42 DMA Controller
lpc_peripheral__interrupt_dispatcher, // 43 I2S
lpc_peripheral__interrupt_dispatcher, // 44 Ethernet
lpc_peripheral__interrupt_dispatcher, // 45 SD Card Interface
lpc_peripheral__interrupt_dispatcher, // 46 Motor Control PWM
lpc_peripheral__interrupt_dispatcher, // 47 PLL 1
lpc_peripheral__interrupt_dispatcher, // 48 Quadrature Encoder
lpc_peripheral__interrupt_dispatcher, // 49 USB Activity
lpc_peripheral__interrupt_dispatcher, // 50 CAN Activity
lpc_peripheral__interrupt_dispatcher, // 51 UART 4
lpc_peripheral__interrupt_dispatcher, // 52 SSP 2
lpc_peripheral__interrupt_dispatcher, // 53 LCD
lpc_peripheral__interrupt_dispatcher, // 54 GPIO Interrupt
lpc_peripheral__interrupt_dispatcher, // 55 PWM 0
lpc_peripheral__interrupt_dispatcher, // 56 EEPROM
};
static void halt(void) {
// This statement resolves compiler warning: variable define but not used
(void)interrupt_vector_table;
while (true) {
}
}Code Block 1. Software Interrupt Vector Table
NOTE: that a vector table is really just a lookup table that hardware utilizes.
Two Methods to set up an ISR on the SJ2
All of the methods require that you run this function to allow the NVIC to accept a particular interrupt request.
NVIC_EnableIRQ(EINT3_IRQn);
Where the input is the IRQ number. This can be found in the LCP40xx.h file. Search for enum IRQn.
Method 1. Modify IVT
We discourage modifying the interrupt_vector_table.c (or startup.cpp for SJ2) vector tables directly.
IVT modify
__attribute__((section(".interrupt_vector_table"))) void_func_ptr_t interrupt_vector_table[] = {
/**
* Core interrupt vectors
*/
(void_func_ptr_t)&_estack, // 0 ARM: Initial stack pointer
cpu_startup_entry_point, // 1 ARM: Initial program counter
halt, // 2 ARM: Non-maskable interrupt
halt, // 3 ARM: Hard fault
halt, // 4 ARM: Memory management fault
halt, // 5 ARM: Bus fault
halt, // 6 ARM: Usage fault
halt, // 7 ARM: Reserved
halt, // 8 ARM: Reserved
halt, // 9 ARM: Reserved
halt, // 10 ARM: Reserved
vPortSVCHandler, // 11 ARM: Supervisor call (SVCall)
halt, // 12 ARM: Debug monitor
halt, // 13 ARM: Reserved
xPortPendSVHandler, // 14 ARM: Pendable request for system service (PendableSrvReq)
xPortSysTickHandler, // 15 ARM: System Tick Timer (SysTick)
/**
* Device interrupt vectors
*/
lpc_peripheral__interrupt_dispatcher, // 16 WDT
lpc_peripheral__interrupt_dispatcher, // 17 Timer 0
lpc_peripheral__interrupt_dispatcher, // 18 Timer 1
lpc_peripheral__interrupt_dispatcher, // 19 Timer 2
lpc_peripheral__interrupt_dispatcher, // 20 Timer 3
lpc_peripheral__interrupt_dispatcher, // 21 UART 0
lpc_peripheral__interrupt_dispatcher, // 22 UART 1
lpc_peripheral__interrupt_dispatcher, // 23 UART 2
my_own_uart3_interrupt, // 24 UART 3 <-------------------- Install your function to the ISR vector directly
// ...
};Code Block 3. Weak Function Override Template
Method 2. ISR Register Function
There is a simple API defined at lpc_peripherals.h that you can use. Be sure to check the implementation of this code module to actually understand what it is doing.
This is the best option! Please use this option almost always!
// Just your run-of-the-mill function
void my_uart3_isr(void) {
do_something();
clear_uart3_interrupt();
}
#include "lpc_peripherals.h"
int main() {
lpc_peripheral__enable_interrupt(LPC_PERIPHERAL__UART3, my_uart3_isr);
// ... rest of the code
}Code Block 5. Weak Function Override Template
| PROS | CONS |
|
|
What to do inside an ISR
Do very little inside an ISR. When you are inside an ISR, the whole system is blocked (other than higher priority interrupts). If you spend too much time inside the ISR, then you are destroying the real-time operating system principle and everything gets clogged.
With that said, here is the general guideline:
Short as possible
DO NOT POLL FOR ANYTHING! Try to keep loops as small as possible. Note that printing data over UART can freeze the entire system, including the RTOS for that duration. For instance, printing 4 chars may take 1ms at 38400bps.
FreeRTOS API calls
If you are using FreeRTOS API, you must use FromISR functions only! If a FromISR function does not exist, then don't use that API.
Clear Interrupt Sources
Clear the source of the interrupt. For example, if interrupt was for rising edge of a pin, clear the "rising edge" bit such that you will not re-enter into the same interrupt function.
If you don't do this, your interrupt will get stuck in an infinite ISR call loop. For the Port interrupts, this can be done by writing to the IntClr registers.
ISR processing inside a FreeRTOS Task
It is a popular scheme to have an ISR quickly exit, and then resume a task or thread to process the event. For example, if we wanted to write a file upon a button press, we don't want to do that inside an ISR because it would take too long and block the system. What we can utilize a wait on semaphore design pattern.
What you may argue with the example below is that we do not process the ISR immediately, and therefore delay the processing. But you can tackle this scenario by resuming a HIGHEST priority task. Immediately, after the ISR exits, due to the ISR "yield", FreeRTOS will resume the high priority task immediately rather than servicing another task
/* Create the semaphore in main() */
SemaphoreHandle_t button_press_semaphore = NULL;
void my_button_press_isr(void) {
long yield = 0;
xSemaphoreGiveFromISR(button_press_semaphore, &yield);
portYIELD_FROM_ISR(yield);
}
void button_task(void *pvParameter)
{
while(1) {
if (xSemaphoreTake(button_press_semaphore, portMAX_DELAY)) {
/* Process the interrupt */
}
}
}
void main(void)
{
button_press_semaphore = xSemaphoreCreateBinary();
/* TODO: Hook up my_button_press_isr() as an interrupt */
/* TODO: Create button_task() and start FreeRTOS scheduler */
}Code Block 6. Wait on Semaphore ISR design pattern example
Resources
http://infocenter.arm.com/help/index.jsp?topic=/com.arm.doc.ddi0489b/CACDDJHB.html
Lab: Interrupts and Binary Semaphores
Objective
Learn how to create a single dynamic user defined interrupt service routine callback driver/library. Be sure to click through the hyperlinks provided in this article to learn the background knowledge before you jump into the assignment. You may re-use any existing code, such as the API from gpio.h header file.
This lab will utilize:
- Semaphores
- Wait on Semaphore Design pattern
-
Lookup table structures and Function Pointers
- You will allow the user to register their callbacks
- Be sure to understand how function pointers work
-
Interrupts
- LPC supports rising and falling edge interrupts on certain port pins
- These port/pin interrupts are actually OR'd together and use a single CPU interrupt.
- On the SJ2 board, GPIO interrupts are handled by a dedicated GPIO interrupt (exception number 54)
- For the SJ1 board, it is: EINT3 interrupt.
Where to start
-
For Part 0, do the following
- Read the LPC User Manual, particularly ALL information about
Table 95: GPIO Interrupt - Browse the code, and fully absorb
interrupt_vector_table.candentry_point.c
- Read the LPC User Manual, particularly ALL information about
- For Part 1, first review the Semaphore Design pattern that will be utilized later
Port Interrupts
You will configure GPIO interrupts. This is supported for Port0 and Port2 and the following registers are relevant. Note that there is a typo in the LPC user-manual as pointed by the orange notation below.
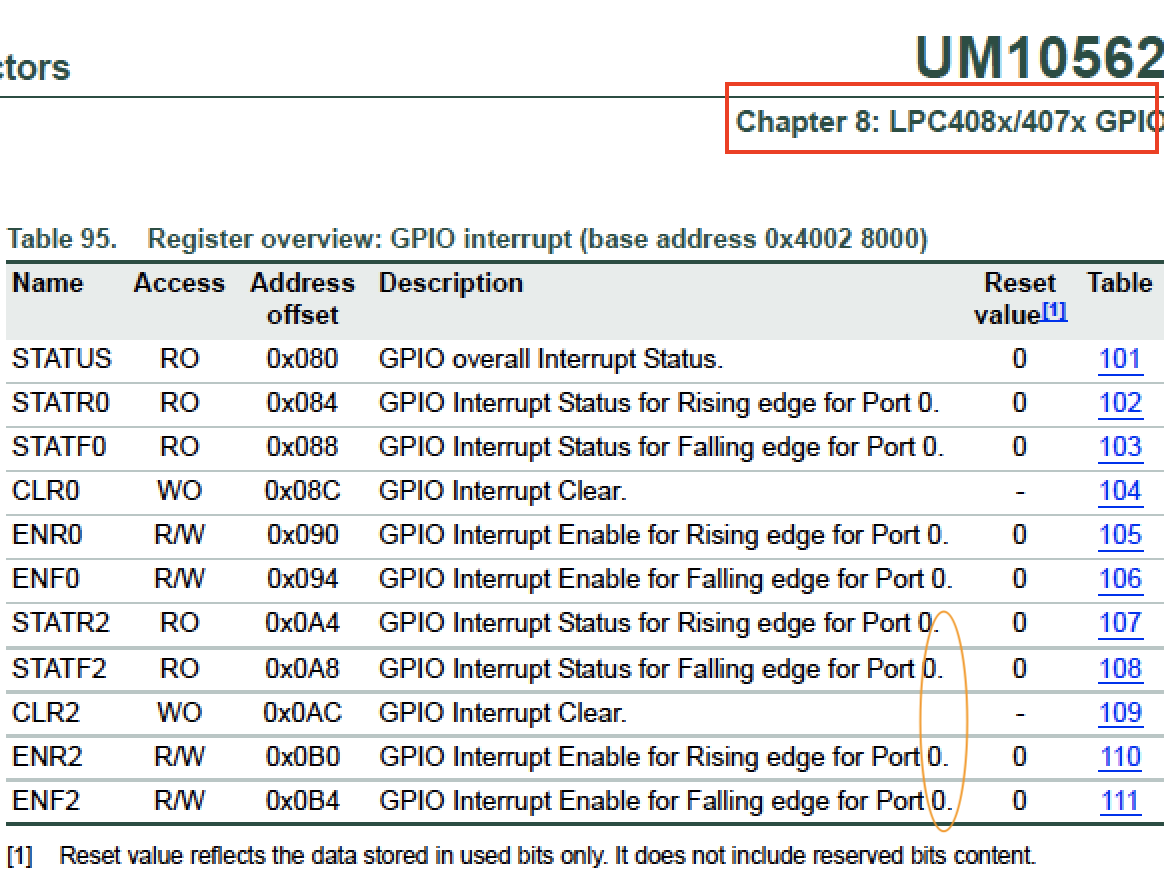
For extra reading material, you can take a look at Chapter 5: LPC408x/407x User Manual, and the Chapter 8 section 8.5.2 to understand more about the GPIO interrupt block diagram

Assignment
Part 0: Simple Interrupt
The first thing you want to do is get a single Port/Pin's interrupt to work without using the RTOS. Make sure you fully understand the following diagram before you proceed. You will configure bits to trigger your GPIO interrupt, and you must also clear bits inside of your GPIO interrupt.
.png)
#include <stdio.h>
#include "lpc40xx.h"
// Step 1:
void main(void) {
// Read Table 95 in the LPC user manual and setup an interrupt on a switch connected to Port0 or Port2
// a) For example, choose SW2 (P0_30) pin on SJ2 board and configure as input
//. Warning: P0.30, and P0.31 require pull-down resistors
// b) Configure the registers to trigger Port0 interrupt (such as falling edge)
// Install GPIO interrupt function at the CPU interrupt (exception) vector
// c) Hijack the interrupt vector at interrupt_vector_table.c and have it call our gpio_interrupt()
// Hint: You can declare 'void gpio_interrupt(void)' at interrupt_vector_table.c such that it can see this function
// Most important step: Enable the GPIO interrupt exception using the ARM Cortex M API (this is from lpc40xx.h)
NVIC_EnableIRQ(GPIO_IRQn);
// Toggle an LED in a loop to ensure/test that the interrupt is entering ane exiting
// For example, if the GPIO interrupt gets stuck, this LED will stop blinking
while (1) {
delay__ms(100);
// TODO: Toggle an LED here
}
}
// Step 2:
void gpio_interrupt(void) {
// a) Clear Port0/2 interrupt using CLR0 or CLR2 registers
// b) Use fprintf(stderr) or blink and LED here to test your ISR
}
Part 1: Interrupt with Binary Semaphore
You will essentially complete Part 0, but with the RTOS using a binary semaphore as a signal to wake a sleeping task. It is recommended to save your code in a separate file (or comment it out), and then start this section of the lab. Do not forget to reference the Semaphore Design Pattern.
For the code that you turn in, you do not have to turn in Part 0 separately since that was just started code for you to get started with the lab. Furthermore, you should improve your code in this part and use the API from lpc_peripherals.h to register your interrupt callback: lpc_peripheral__enable_interrupt(LPC_PERIPHERAL__GPIO, my_gpio_interrupt, "name");
#include "FreeRTOS.h"
#include "semphr.h"
#include "lpc40xx.h"
static SemaphoreHandle_t switch_pressed_signal;
void main(void) {
switch_pressed_signal = ... ; // Create your binary semaphore
configure_your_gpio_interrupt(); // TODO: Setup interrupt by re-using code from Part 0
NVIC_EnableIRQ(GPIO_IRQn); // Enable interrupt gate for the GPIO
xTaskCreate(sleep_on_sem_task, "sem", (512U * 4) / sizeof(void *), NULL, PRIORITY_LOW, NULL);
vTaskStartScheduler();
}
// WARNING: You can only use printf(stderr, "foo") inside of an ISR
void gpio_interrupt(void) {
fprintf(stderr, "ISR Entry");
xSemaphoreGiveFromISR(switch_pressed_signal, NULL);
clear_gpio_interrupt();
}
void sleep_on_sem_task(void * p) {
while(1) {
// Use xSemaphoreTake with forever delay and blink an LED when you get the signal
}
}
Part 2: Support GPIO interrupts using function pointers
In this part, you will use the main GPIO interrupt to be able to dispatch user registered interrupts per pin.
You are designing a library that will allow the programmer to be able to "attach" a function callback to any and each pin on Port 0. Implement all methods and it should work as per the description mentioned in the comments above each function declaration.
// Objective of the assignment is to create a clean API to register sub-interrupts like so:
void pin30_isr(void) { }
void pin29_isr(void) { }
// Example usage:
void main(void) {
gpio0__attach_interrupt(30, GPIO_INTR__RISING_EDGE, pin30_isr);
gpio0__attach_interrupt(29, GPIO_INTR__FALLING_EDGE, pin29_isr);
}Here is starter code for you that demonstrates the use of function pointers:
// @file gpio_isr.h
#pragma once
typedef enum {
GPIO_INTR__FALLING_EDGE,
GPIO_INTR__RISING_EDGE,
} gpio_interrupt_e;
// Function pointer type (demonstrated later in the code sample)
typedef void (*function_pointer_t)(void);
// Allow the user to attach their callbacks
void gpio0__attach_interrupt(uint32_t pin, gpio_interrupt_e interrupt_type, function_pointer_t callback);
// Our main() should configure interrupts to invoke this dispatcher where we will invoke user attached callbacks
// You can hijack 'interrupt_vector_table.c' or use API at lpc_peripherals.h
void gpio0__interrupt_dispatcher(void) {
}And here is the sample code for the implementation:
// @file gpio_isr.c
#include "gpio_isr.h"
// Note: You may want another separate array for falling vs. rising edge callbacks
static function_pointer_t gpio0_callbacks[32];
void gpio0__attach_interrupt(uint32_t pin, gpio_interrupt_e interrupt_type, function_pointer_t callback) {
// 1) Store the callback based on the pin at gpio0_callbacks
// 2) Configure GPIO 0 pin for rising or falling edge
}
// We wrote some of the implementation for you
void gpio0__interrupt_dispatcher(void) {
// Check which pin generated the interrupt
const int pin_that_generated_interrupt = logic_that_you_will_write();
function_pointer_t attached_user_handler = gpio0_callbacks[pin_that_generated_interrupt];
// Invoke the user registered callback, and then clear the interrupt
attached_user_handler();
clear_pin_interrupt(pin_that_generated_interrupt);
}
Below image shows the software workflow. Click on the image below to view animation and understand more on how the driver should work.
Extra Credit
There are a number of ways to go the extra step and separate yourself from an average student. For this lab, you can do several things to earn extra credit:
- Go back to the previous lab, and instead of implementing a task that reads input, design it such that it registers a callback instead.
- Improve the code quality. Instead of hacky code that barely works, demonstrate your code quality by making your code more robust and clean.
-
You can extend your API in
Part 2to also supportPort 2
Requirements
- You should be able to fully re-write code for
Part 0orPart 1, meaning that you understand the code that you just wrote. You are encouraged to ask questions for any line of code that is not well understood (or magical). - Should be able to specify a callback function for any pin for an exposed GPIO given a rising or falling condition
- We may ask you to change which pin causes a particular callback to be executed in your code and then recompile and re-flash your board to and prove it works with any pin
Note that printing 4 chars inside an ISR can take 1ms at 38400bps, and this is an eternity for the processor and should never be done (other than todebug)
What to turn in:
- Place all relevant source files within a .pdf file.
- Turn in the screenshots of terminal output.